Tactile information collection in interaction-flexible tactile sensor:
According to the human-like grasping characteristics of the robot, it has multiple contact surfaces (bottom, left, right)
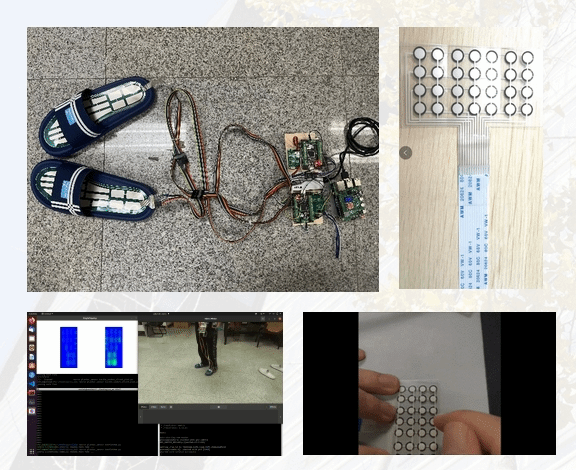
Distributed structure - easy to locate
Each sensing unit is 3 mm in diameter and the sensor thickness is 0.8 mm
The
flexible tactile sensor is based on the piezoresistive principle and
detects tactile force information at each point by measuring the change
in resistance value of the force-sensitive material. Each sensor has a
total of 16 sensing units, which collects pressure data during walking
in real time and uploads it to the host computer for display and
storage.