A tactile sensor is a device that can acquire the properties of an
object being touched. Can include object material, texture, surface
temperature, roughness and even weight.
Vision-based tactile
sensors use cameras to capture the deformation of the contact surface as
tactile information. Taxel-based tactile sensors are composed of
multiple tactile sensing units (Taxels) and can collect force
distribution information within a certain range around the contact. This
project combines the characteristics of Vision-Based high resolution
and Taxel-Based flexibility and easy integration.
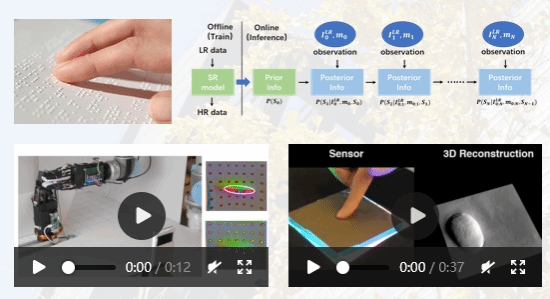
When you first
touch an object, through a small amount of observation data + prior
knowledge, the prior knowledge dominates; after constantly touching the
object, through a large amount of observation data + prior knowledge, at
this time the prior is corrected through a large number of observations
.